



fig4
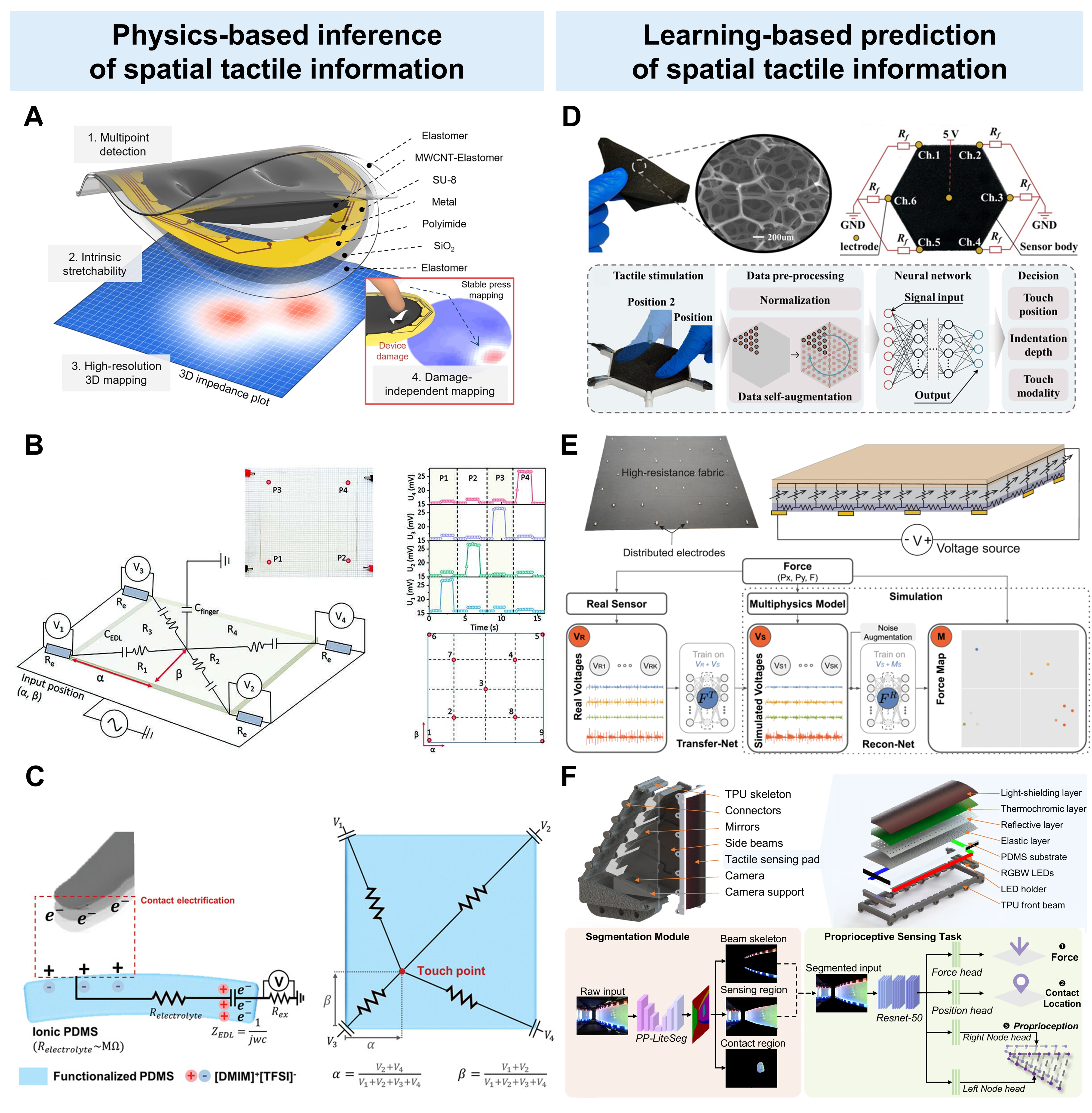
Figure 4. Physics-based inference and learning-based prediction of spatial tactile information in array-free tactile sensing architectures. (A) An ultrathin EIT-based soft e-skin for high-resolution tactile mapping with multipoint detection and damage tolerance operation. Reproduced from Ref.[88] under the CC BY-NC license, Copyright © 2024 The American Association for the Advancement of Science; (B) SFITS that determines touch positions on a continuous ionic film from distributed voltage signals. Reproduced with permission from Ref.[89], Copyright © 2025 Wiley; (C) Grid-free triboresistive touch sensor based on monolayered ionic PDMS for touch-point recognition. Reproduced with permission from Ref.[90], Copyright © 2022 Wiley; (D) Bioinspired hexagonal tactile sensor combined with deep learning for spatially continuous touch localization and modality recognition. Reproduced from Ref.[95] under the CC BY 4.0 license, Copyright © 2022 The Author(s); (E) A hybrid sim-to-real learning framework for force-map reconstruction in a large-area ERT-based tactile sensor. Reproduced from Ref.[96] under the CC BY-NC-ND 4.0 license, Copyright © 2022 The Author(s); (F) A compliant visuotactile gripper with a multi-mirror optical system and a decoupled deep learning framework for accurate multimodal haptic perception under large deformation. Reproduced from Ref.[97] under the CC BY-NC-ND license, Copyright © 2025 The Author(s). EIT: Electrical impedance tomography; e-skin: electronic-skin; SFITS: silk fibroin ionic touch screen; PDMS: polydimethylsiloxane; ERT: electrical resistance tomography; MWCNT: multiwall carbon nanotube; GND: ground; TPU: thermoplastic polyurethane; RGBW: red, green, blue, white; LEDs: light emitting diodes.





