



fig5
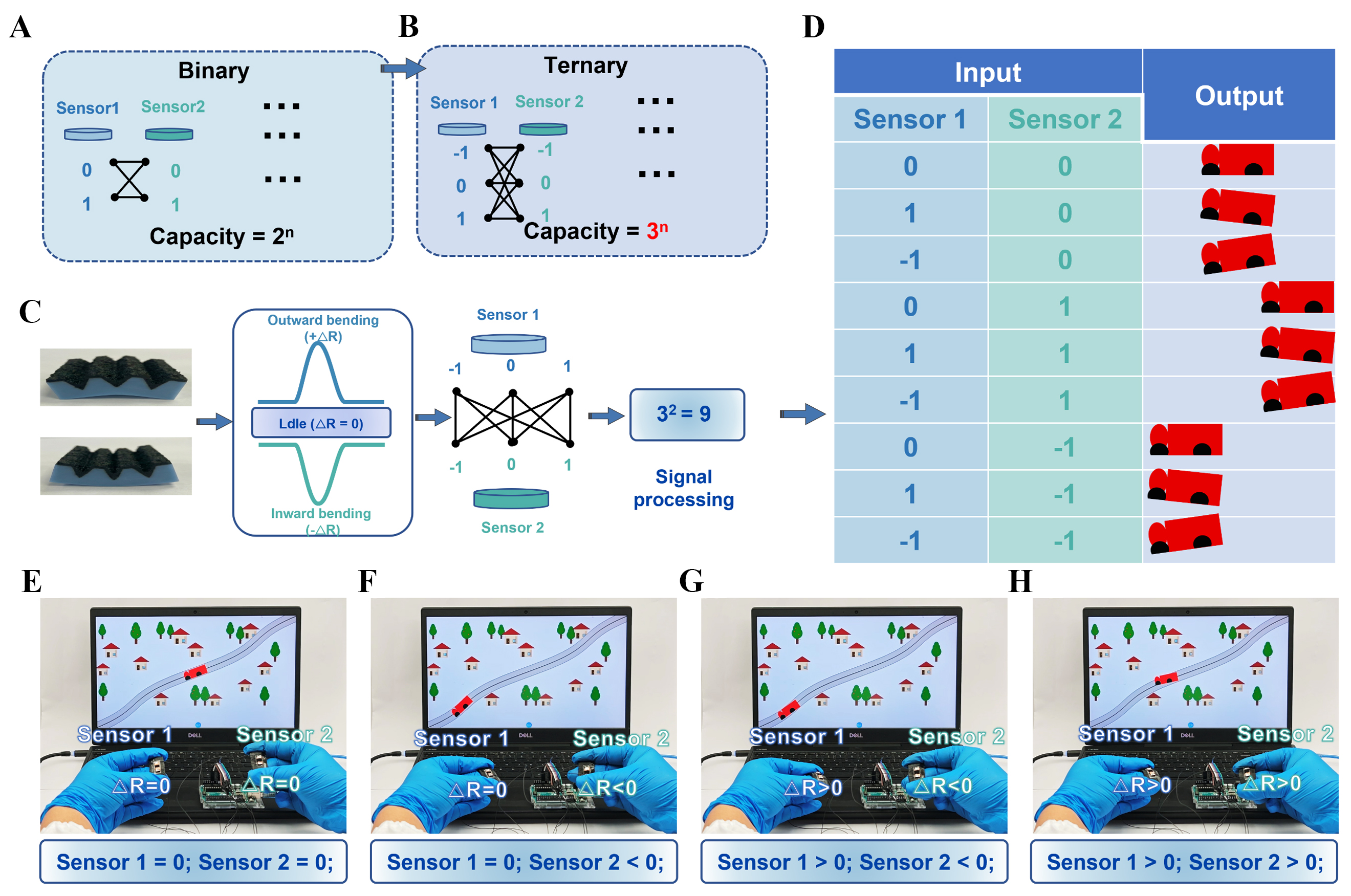
Figure 5. Demonstration of the ternary-logic interaction system for high-dimensional HMI control. (A) Traditional binary logic systems (2n) and (B) the proposed ternary-logic system (3n); (C) Two bidirectional sensors generate three discrete states based on deformation mechanics including “1” (outward bending, +ΔR), “0” (idle, stable R0), and “-1” (inward bending, -ΔR), establishing a nine-command matrix; (D) Logic truth table mapping specific input combinations from Sensors 1 and 2 to nine distinct vehicular motion commands (e.g., forward, reverse, spot turns, and differential steering); (E-H) Real-time photographs (taken by the authors) of the “virtual car racing” demonstration, where the operator controls the vehicle using distinct finger bending modes: (E) idle state (0, 0) for stopping; (F) single-channel actuation (0, -1) for simple steering; (G) mixed-mode actuation (1, -1) for complex differential maneuvers; and (H) dual-channel synchronous actuation (1, 1) for straight acceleration. HMI: Human-machine interface.





