



fig1
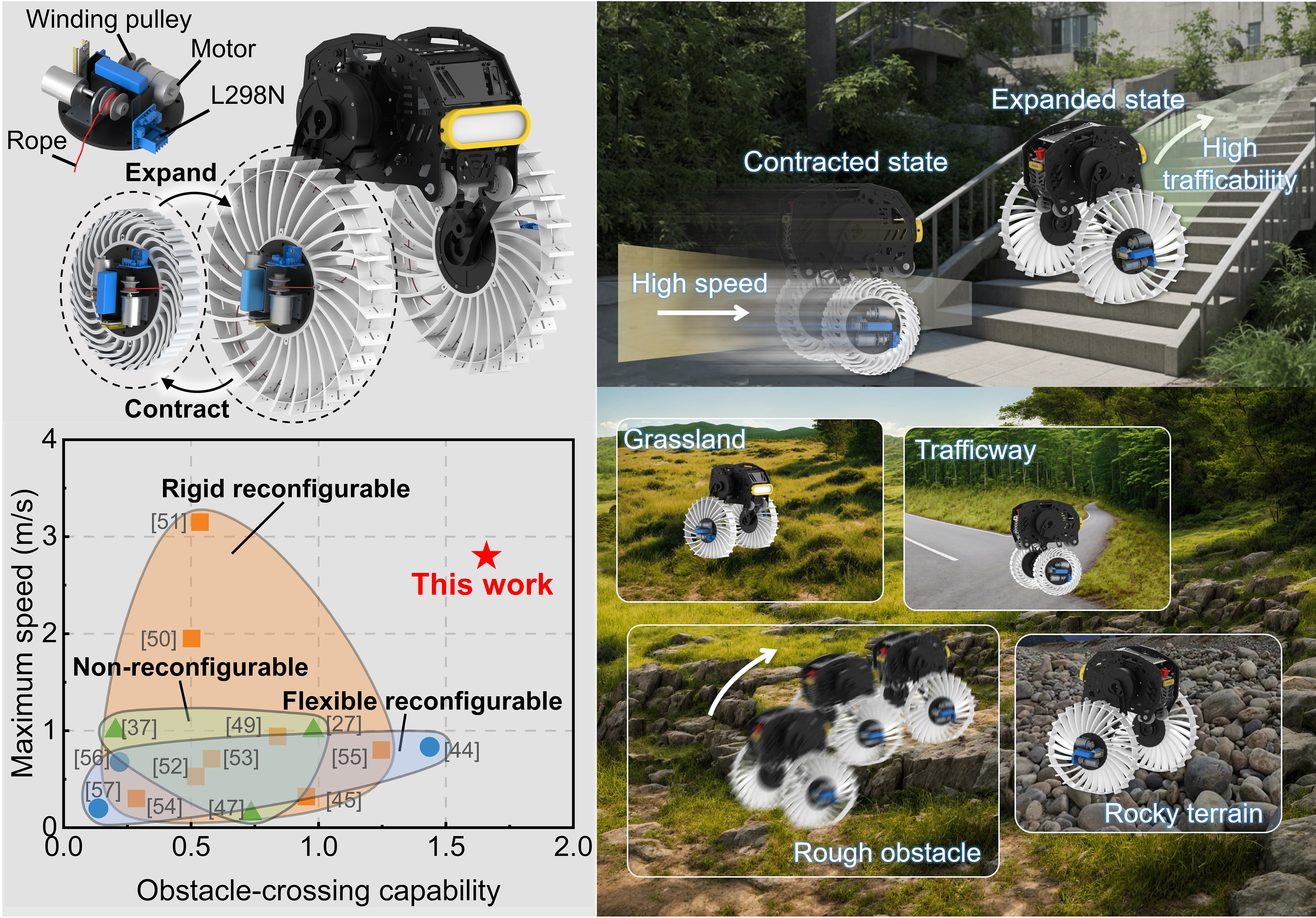
Figure 1. Design concept and locomotion performance of the proposed robot. The stiffness and locomotion-mode modulation of the spiral wheel via a rope-driven mechanism is illustrated. In the absence of rope tension, the wheels remain in their expanded, low-stiffness configuration for navigating obstacles. When the rope is tensioned, the motor contracts the wheel into a high-stiffness mode for efficient, high-speed movement. This reconfigurable design enhances the adaptability of wheeled platforms across diverse terrains, such as stairs and outdoor environments. The Ashby plot compares the proposed wheel’s performance with existing designs, demonstrating both a high obstacle-crossing capability and high-speed locomotion.





