



fig1
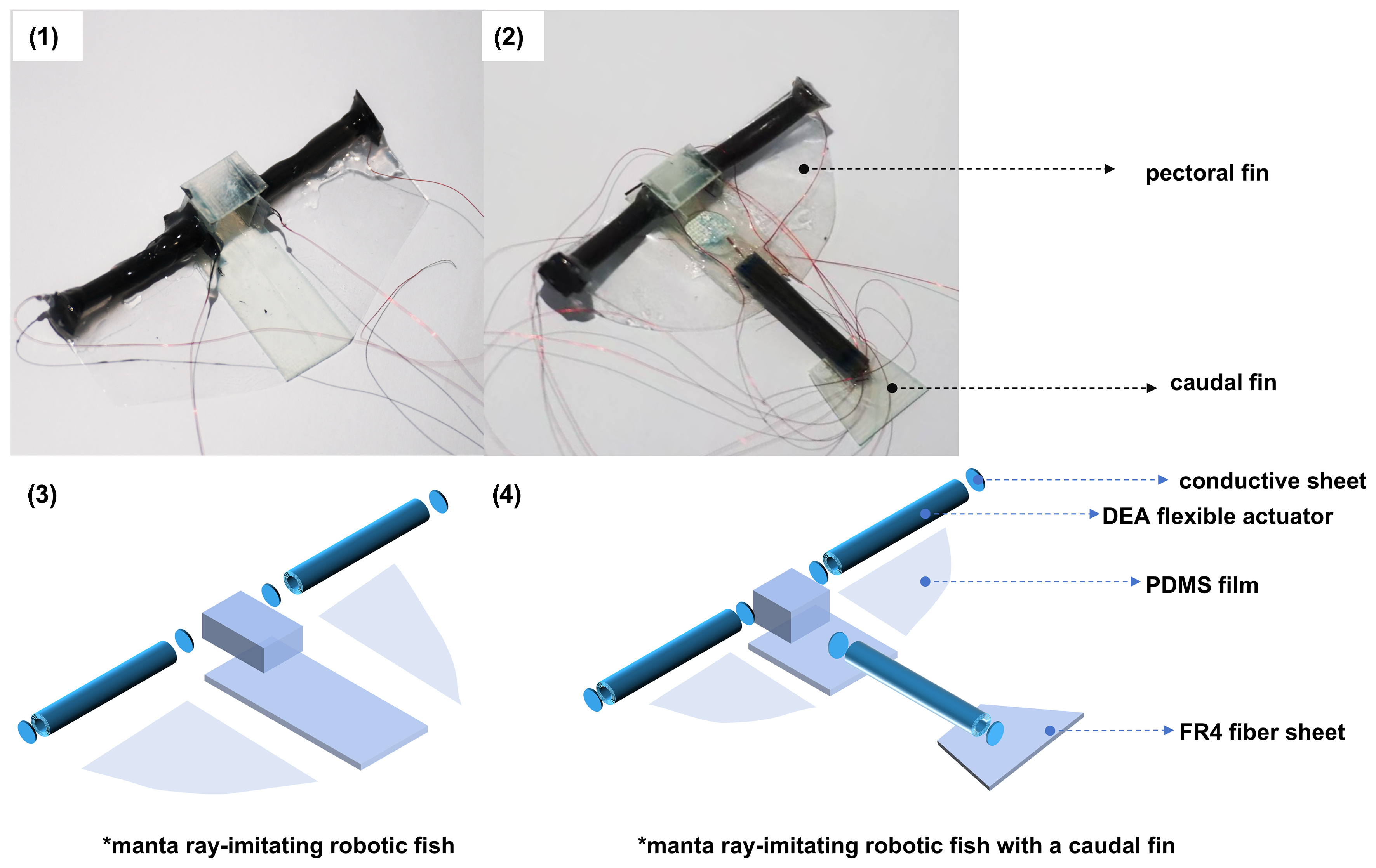
Figure 1. Prototype and schematic diagram of the manta-ray-inspired underwater robot. Photograph taken by the authors [Figure 1 (1) and Figure 1 (2)]. DEA: Dielectric elastomer actuator; PDMS: polydimethylsiloxane.
Figure 1. Prototype and schematic diagram of the manta-ray-inspired underwater robot. Photograph taken by the authors [Figure 1 (1) and Figure 1 (2)]. DEA: Dielectric elastomer actuator; PDMS: polydimethylsiloxane.


All published articles are preserved here permanently:
https://www.portico.org/publishers/oae/


