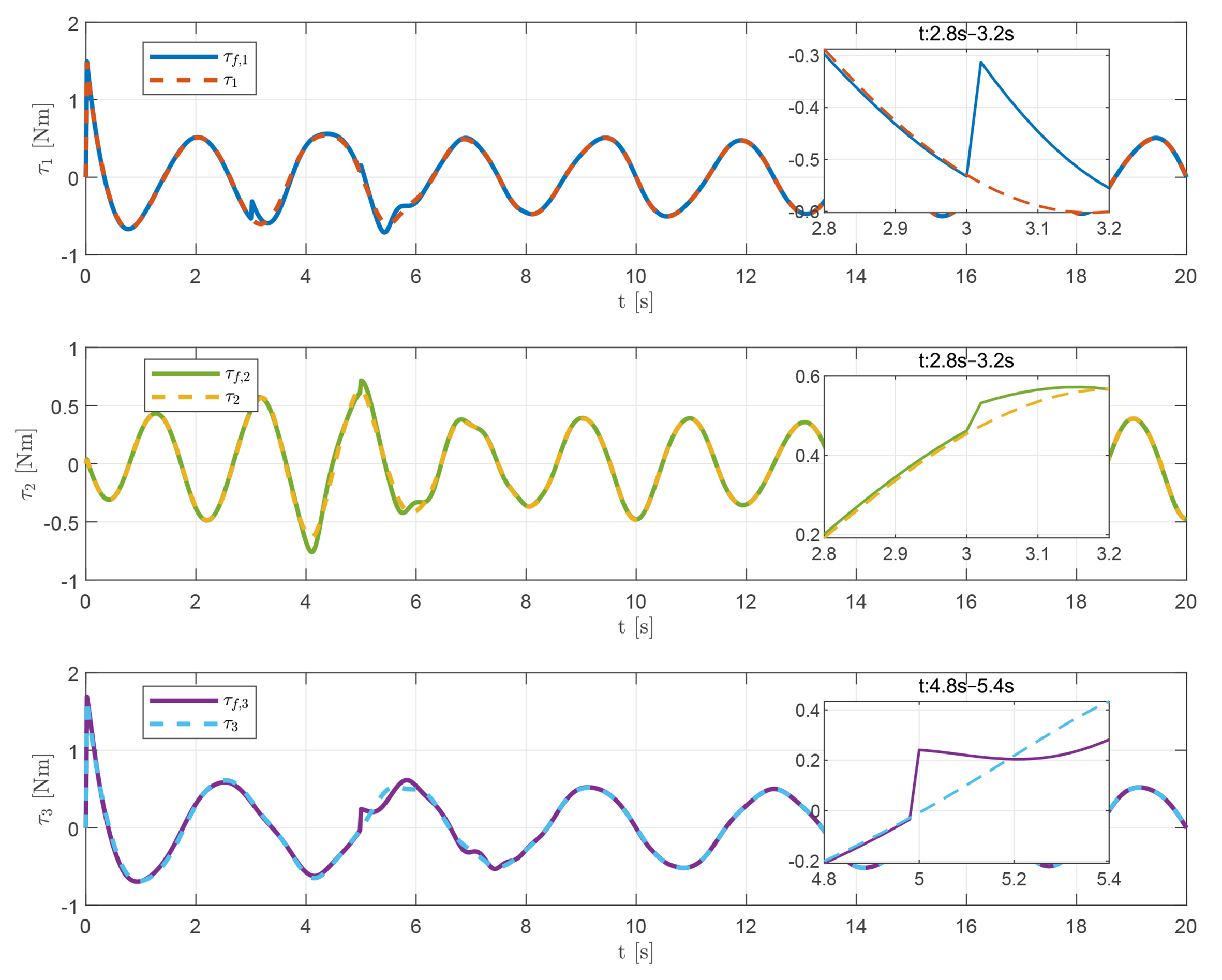
Figure 11. Comparison between the actual control input $$ \tau_f $$ and the designed control signal $$ \tau $$.
All published articles are preserved here permanently: