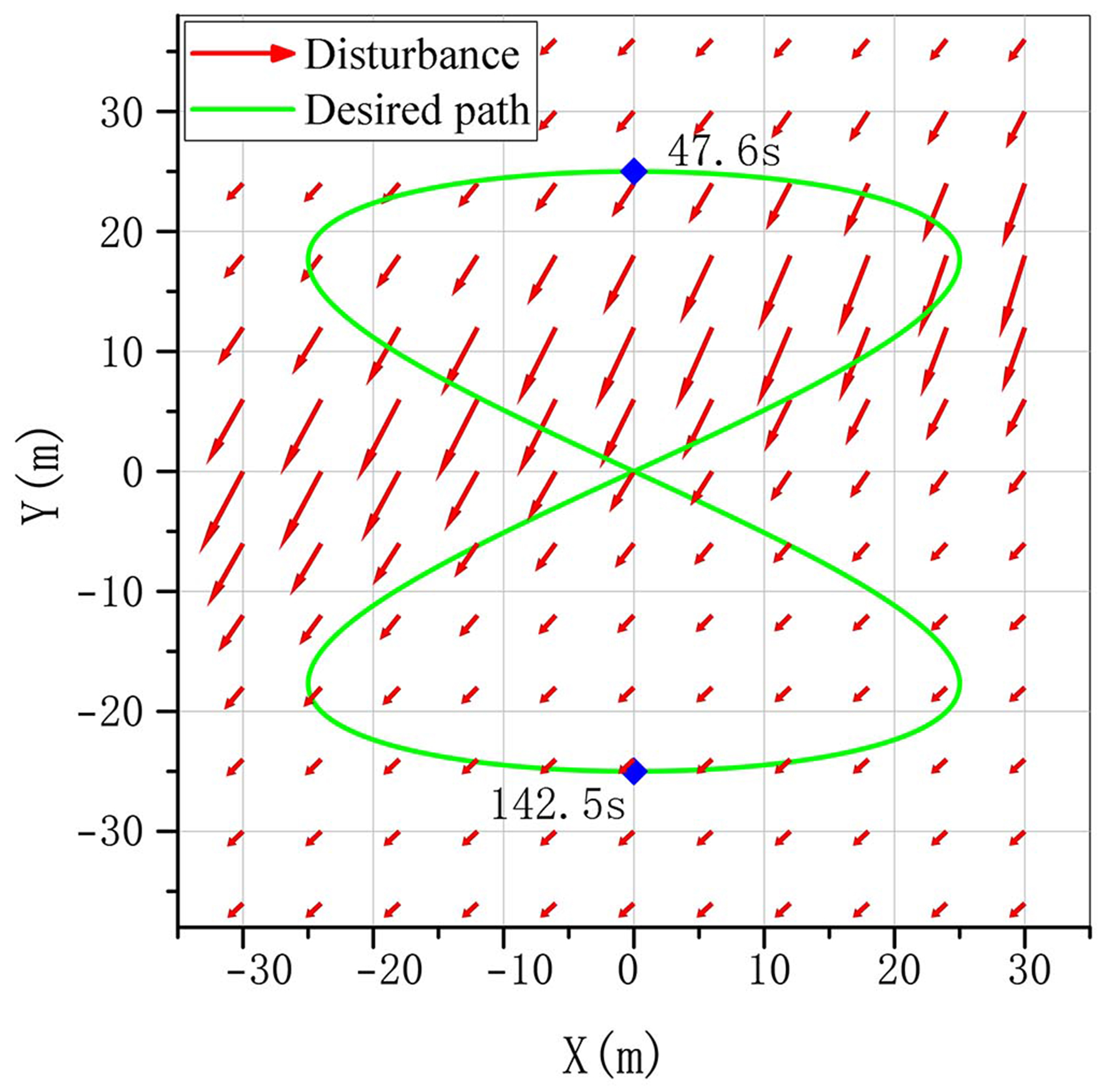
Figure 9. Top view of current disturbance and the desired path.
All published articles are preserved here permanently: